灵巧手成人形机器人“黄金赛道”,国内外技术路线大 PK
创始人
2025-07-14 18:19:05
0次
PHPWord
慧博投研近日发布研究报告,对灵巧手行业进行点评。
灵巧手作为人形机器人核心执行末端,模仿人手结构与功能,需具备高自由度、精准操作和环境感知能力,在机器人成本中占重要份额。
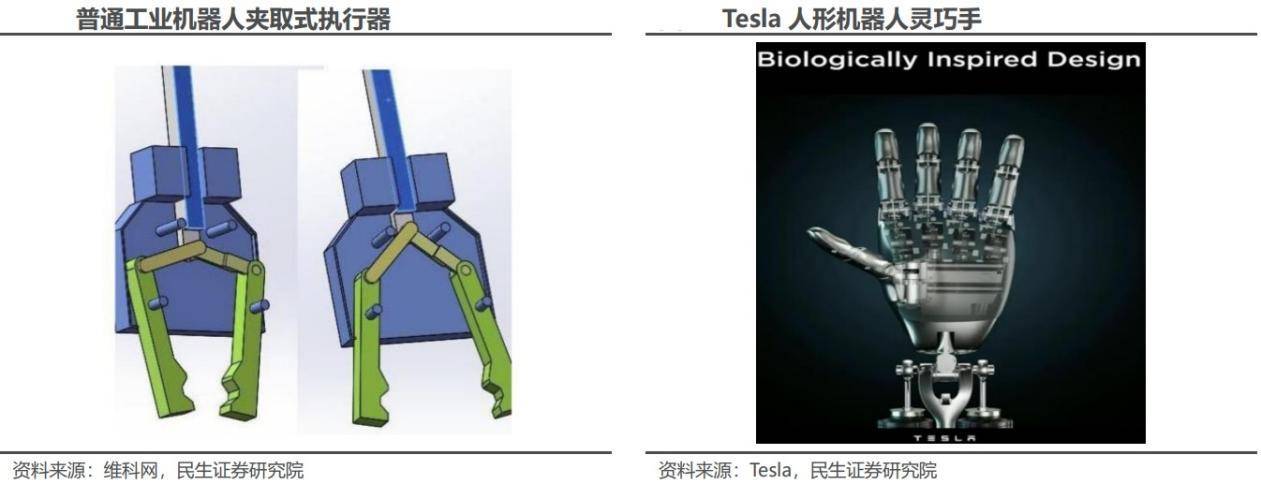
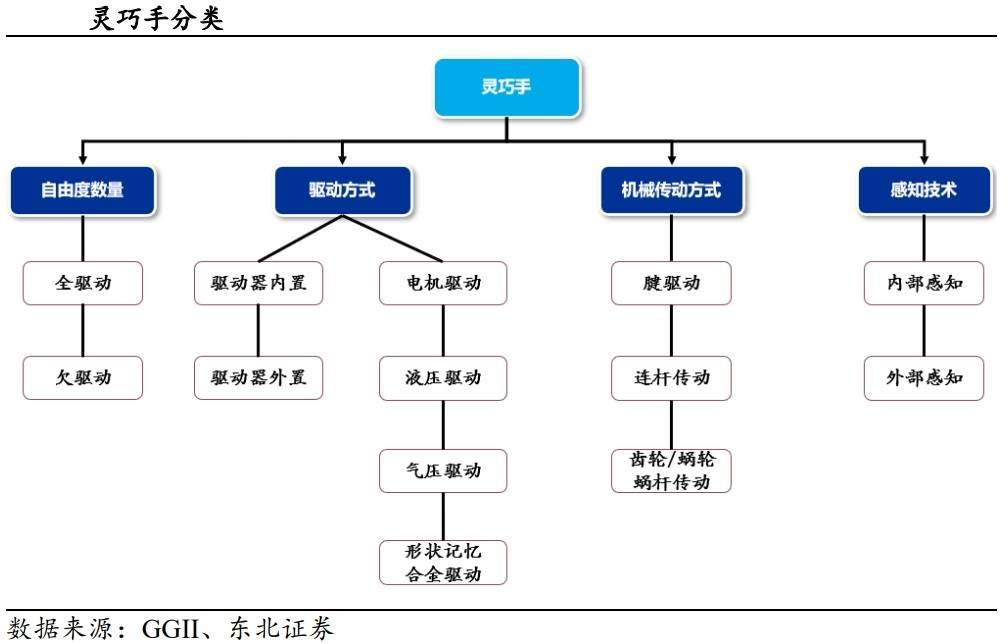
行业概况方面,灵巧手以人手24个自由度为目标,当前Tesla Optimus灵巧手已达22个自由度。按驱动与结构可分为全驱动(精度高但成本高)和欠驱动(结构简单、成本低),传动方式以腱绳(灵活度高)和连杆(成熟常用)为主。发展历经三阶段,从20世纪70年代现代灵巧手诞生,到90年代集成化设计,再到21世纪智能化与深度仿生。
市场现状显示,2024年全球灵巧手市场规模约76万只/17亿美元,预计2030年达141万只/30亿美元,CAGR 14.5%。海外企业如SCHUNK、Shadow Robot技术领先,国内因时机器人、兆威机电等快速追赶,兆威机电灵巧手已实现17-20个自由度。
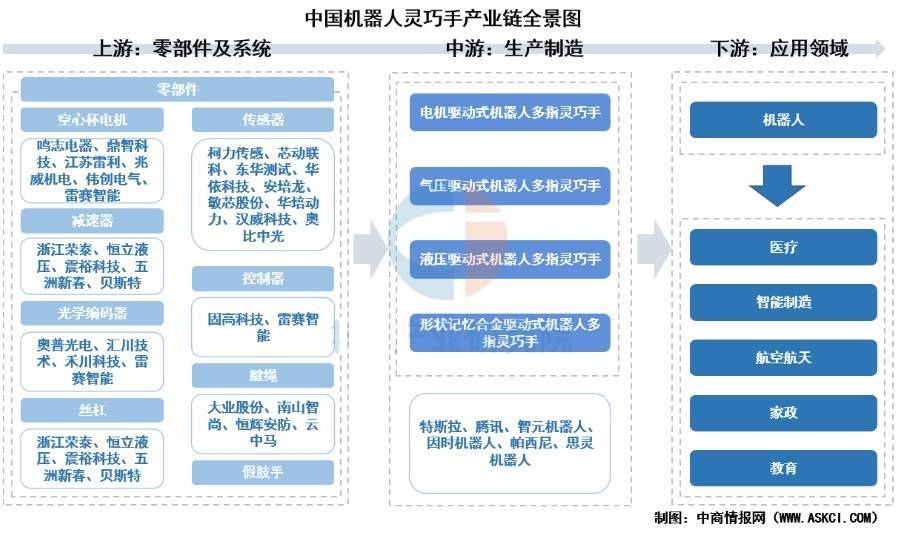
技术方案上,海外侧重腱绳传动(如Tesla),国内以连杆为主(如兆威)。硬件需平衡成本与性能,软件依赖深度学习但缺乏开源数据。产业链上游核心部件中,空心杯电机海外占85%市场份额,国内鸣志电器等加速替代;中游以系统集成为主;下游应用于工业、医疗、家庭服务等领域。
竞争格局分为本体自研派(星动纪元等)、新势力(因时机器人等)、零部件延伸派(兆威机电等)。市场机遇集中在驱动电机(空心杯与直流无刷电机)、传动系统(丝杠+腱绳复合方案)、触觉传感器(向电子皮肤迭代)。未来将向柔性感知、结构紧凑、深度仿生发展。
【注】更多研报请上慧博智能策略终端PC版或慧博投资分析APP
相关内容
热门资讯
“美学与文化的碰撞” IP联名...
北京时间9月9日,国际金价再创新高。Wind数据显示,截至当日19点,伦敦现货黄金盘中最高价为365...
全球央行买不停,黄金成储备资产...
金价屡创新高之际,全球央行购金热情持续高涨。黄金这一“王者”资产正以一骑绝尘之姿,重塑全球资产的配置...
58国货币上的“中国造”,折射...
58国货币上的“中国造”,折射民心共鸣 □ 湖北日报评论员 周磊 阅读提要 121枚世界货币像一枚...
高碑店拓辰建材有限公司成立 注...
天眼查App显示,近日,高碑店拓辰建材有限公司成立,法定代表人为商中军,注册资本30万人民币,经营范...
雄县乐户箱包厂(个体工商户)成...
天眼查App显示,近日,雄县乐户箱包厂(个体工商户)成立,法定代表人为安雪亚,注册资本1万人民币,经...
海陵区锦悦嘉包装材料经营部(个...
天眼查App显示,近日,海陵区锦悦嘉包装材料经营部(个体工商户)成立,法定代表人为韩景根,注册资本1...
辽宁锐盛达电气设备制造厂(个人...
天眼查App显示,近日,辽宁锐盛达电气设备制造厂(个人独资)成立,法定代表人为常超,注册资本100万...
美财长:相信最高法院会支持特朗...
在美国最高法院同意快速审理特朗普关税合法性相关案件之际,美国财政部长贝森特当地时间9日周二重申,他对...
近两月刑事立案4起!平安银行信...
深圳商报·读创客户端首席记者 谢惠茜 近期,平安银行股份有限公司信用卡中心(以下简称“平安银行信用卡...
建设银行获得发明专利授权:“基...
证券之星消息,根据天眼查APP数据显示建设银行(601939)新获得一项发明专利授权,专利名为“基于...